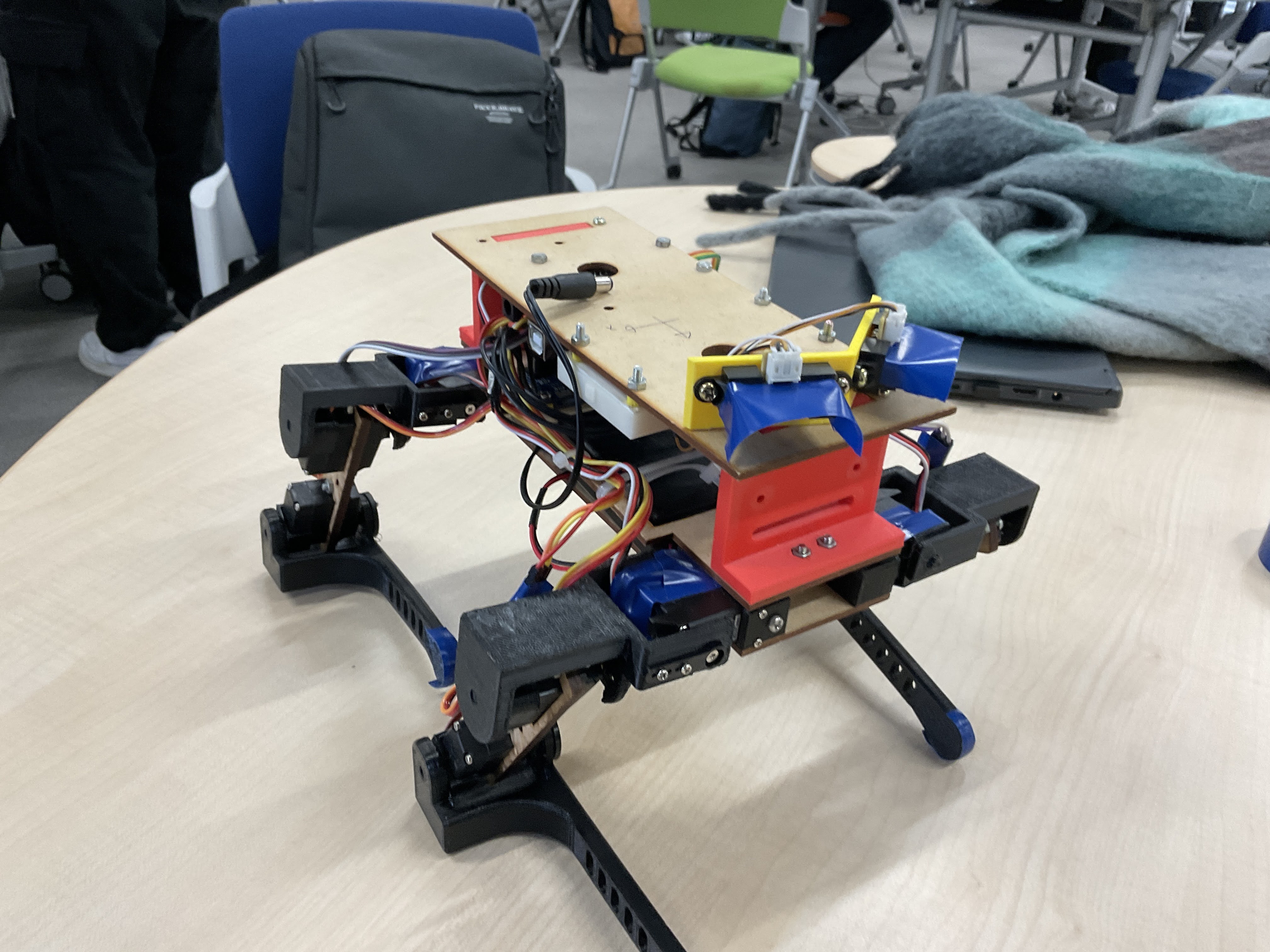
4足歩行ロボット
大学の授業で作ったロボットです.
大きな段差がある道を渡るのとサッカーのPKのキーパー役をしてボールを止める課題がありました.
多くのロボットがyaw軸方向の間接があるロボットを作るのに対して,ここでも逆張りでSpotのような犬のようなロボットを目指しました.
このロボットでも家にある3Dプリンタがフル稼働でした.
結果としては道は渡れなかったものの,歩いてPKを止めることができました.
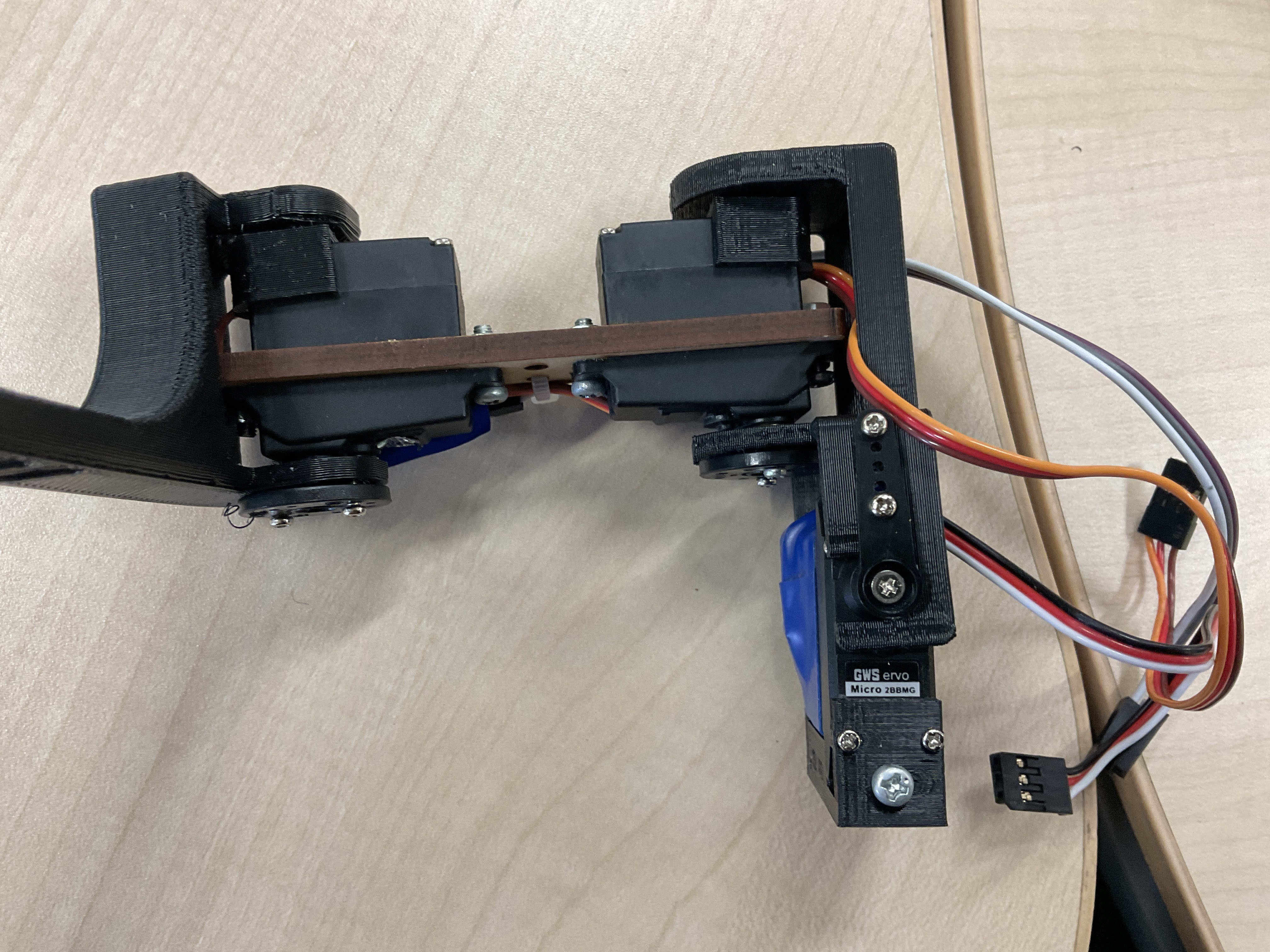
歩容を何種類か試しましたが,結果的にはサーボの数が多い割に電池が単三電池であることから電流不足でモータが安定せずに安定した歩容が実現できませんでした.
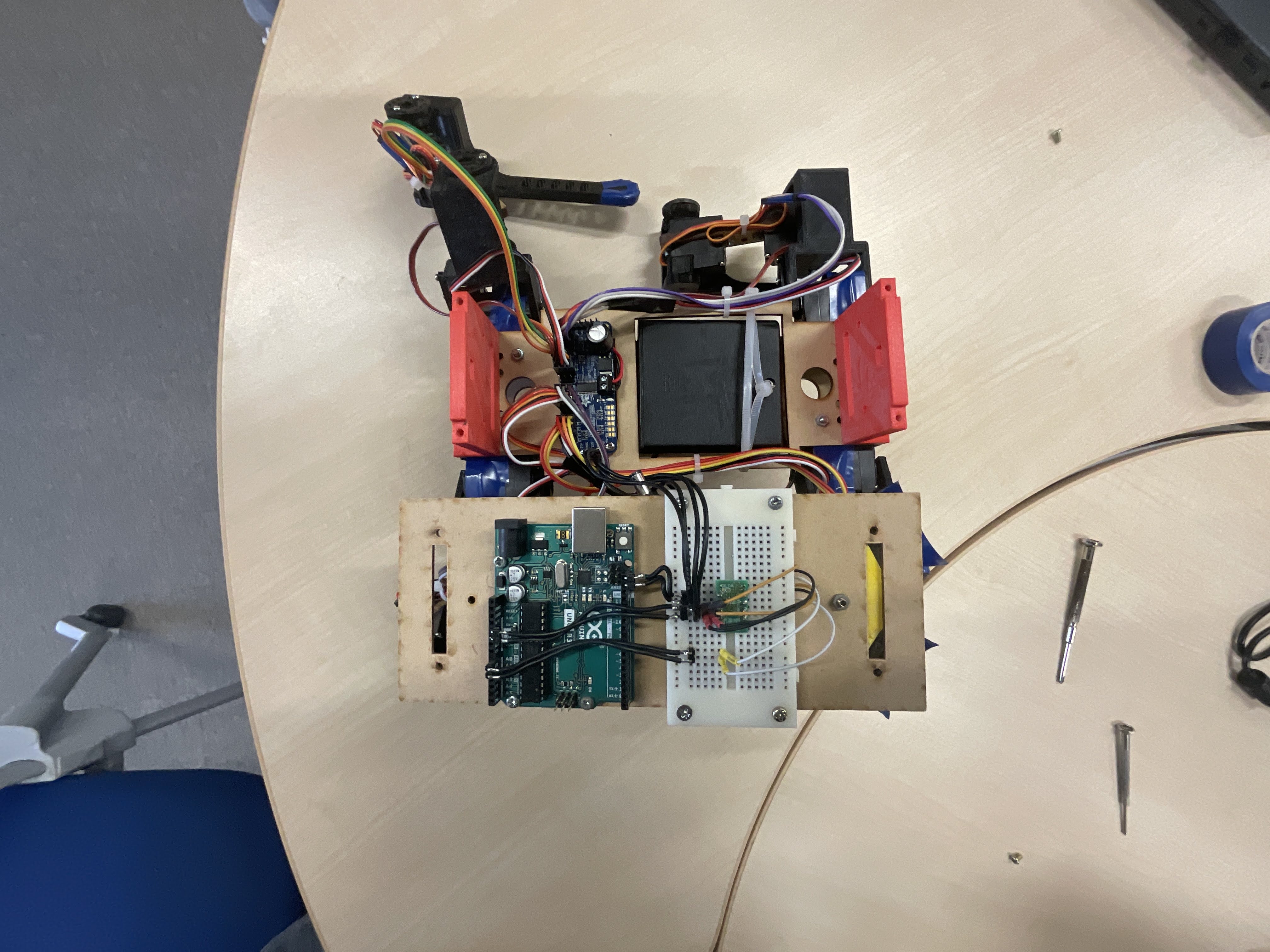
逆運動を利用し足先の座標を求め,さらには9軸センサによる姿勢を用いたフィードバック制御も実装し姿勢制御を行いました.
それでも,見た目も可愛く,高度な制御を取り入れることができ,とても楽しかったです.
私は機体設計・製作,歩容のプログラムを担当し,もう1人がPKのプログラム,もう1人がリーダーという形で開発を進めました.
Gallery
逆運動による足の運動
姿勢フィードバックを用いた制御
歩容の様子